
Il Podoscopio Led Podo Laser di Sprintit sta rivoluzionando il modo di valutare il piede in ottica posturale. Lo scorso anno sono stati prodotti almeno 4 lavori scientifici a livello Universitario ciascuno dei quali ha approfondito un particolare aspetto del protocollo proposto per la valutazione del piede con l’ausilio del laser.
Questa settimana pubblichiamo un estratto sul piede dalla tesi di Erica Venzo Universitá di Padova Facoltá di Scienze Motorie anno accademico 2016, un lavoro condotto su atleti mezzofondisti.
VALUTAZIONE DELL’APPOGGIO PLANTARE CON LA TECNOLOGIA DEL LASER.
UNO STUDIO SPERIMENTALE IN UN GRUPPO DI ATLETI MEZZOFONDISTI.
Il download della versione integrale della tesi è disponibile grazie al link che riportiamo sotto a questo estratto. Buona lettura
Estratto dalla tesi:
Alterazioni posturali derivanti da deformazioni plantari
Alcune modificazioni intrinseche a livello plantare possono derivare da sistemi superiori (oculomotricità, sistema stomatognatico), da difetti recettoriali o da una non perfetta simmetria del corpo. La letteratura, per queste ragioni, riporta tre tipologie di piede a seconda delle alterazioni che lo accompagnano:
Piede Causativo
il piede stesso è il responsabile dello squilibrio che provoca la sua patologia. Ci troviamo di fronte ad un problema ascendente che può essere congenito o acquisito ed è il responsabile dello squilibrio posturale nella parte superiore del corpo. Nell’evoluzioni di tali scompensi patologici posturali, poiché il piede è il “tampone” finale al suolo con funzione adattiva e compensativa posto inferiormente al centro di massa, come prima cosa avviene un suo adattamento, dopo 3 mesi si fissa e, successivamente, diviene l’elemento causativo (Bricot B, 1998);
Piede Adattativo
il piede rappresenta un semplice e relegato “tampone” poiché ci troviamo di fronte ad un problema discendente generato per lo più dall’apparato oculomotore od odontostomatognatico, risultando il mezzo di connessione tra gli squilibri ed il suolo. In un primo momento si parla di reversibilità adattiva, risultando sufficiente la correzione della causa primaria per correggere il sistema posturale stesso; dopo 6 – 12 settimane le alterazioni adattive si fissano e diviene indispensabile la correzione del piede per permettere la riprogrammazione del sistema tonico posturale;
Piede Misto
tale piede si presenta contemporaneamente come elemento adattivo e causativo. Deve essere sempre corretto, anche se la componente adattiva è reversibile. Sul piano podalico sono spesso piedi asimmetrici o disarmonici, facilmente individuabili e diagnosticabili (Bricot B, 1998).
Il piede, come visto, è sia un esorecettore che un endorecettore e, in quanto tale, risulta sensibile alle variazioni di carico statiche, dinamiche ed alle due concomitanti.
La parte superiore del corpo, deputata alla funzione orientativa sotto controllo dei muscoli oculomotori, dà ordine al corpo di spostarsi; la parte inferiore del corpo, dunque, trova nei piedi il tampone terminale di scarico delle forze al suolo. Tale struttura si adatta e compensa, se necessario, per evitare uno squilibrio e/o una caduta (Andrè C, 1988).
Gli occhi sono il tipico esempio di associazione di informazioni sia esorecettoriali che propriorecettoriali. La funzione visiva porta al cervello le informazioni che arrivano sulla retina e vengono veicolate alla corteccia visiva, in parte dirette, in parte crociate, per garantire ottima binocularità, visione netta, fusione, spessore, per codificare angoli, velocità e permette una grande integrazione con il sistema vestibolare. La funzione endorecettoriale è affidata ai muscoli oculomotori che governano il rapporto fra visione – movimenti dei globi oculari ed il corpo, che si adatta e compensa per garantire le funzioni orientative centrate negli occhi.
Pertanto, si può affermare che la funzione dei piedi è adattiva-compensativa a livello della parte inferiore del corpo, mentre quella degli occhi è orientativa a livello della parte superiore.
Più precisamente le anomalie podaliche sono:
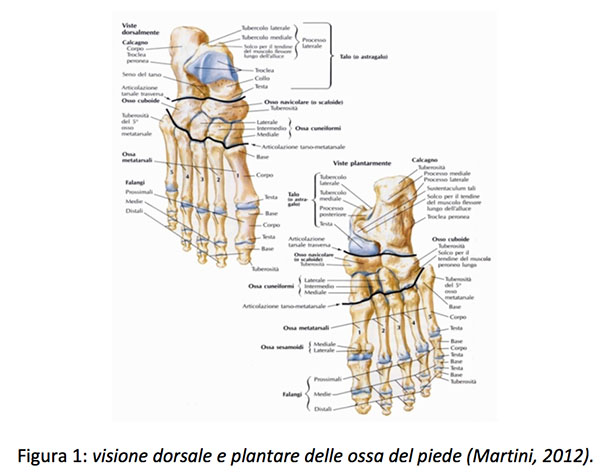
Piede cavo varo:
è un piede causativo caratterizzato dalla caduta astragalo- calcaneare esterna che provoca una rotazione esterna degli assi tibiali e femorali. A livello posturale si possono rilevare diverse situazioni consequenziali: rotazione esterna di gamba e coscia, disassamento esterno rotuleo, tendenza a manifestare varismo di ginocchia, retroversione iliaca, verticalizzazione del sacro e diminuzione della lordosi lombare (Fig.8).
Piede cavo asimmetrico:
vi. Si riscontra una rotazione esterna degli assi tibiali e femorali differenti tra i due emilati corporei, con un ginocchio varo più accentuato su un lato. Inevitabilmente, in conseguenza a tale situazione, si riscontreranno un basculamento e una rotazione del bacino nel suo insieme portato da una coppia di forze torcenti collo – testa e cotile asimmetriche tra i due emilati. Tale rotazione si mostrerà con la parte più bassa e anteriore dal lato meno varo. La colonna vertebrale, a questo punto, tenderà a modificarsi in due modi: armonioso, con attitudine scoliotica o disarmonico, caratterizzato da blocchi vertebrali a vari livelli aggravati da retrazioni muscolari o anzianità dei soggetti analizzati.
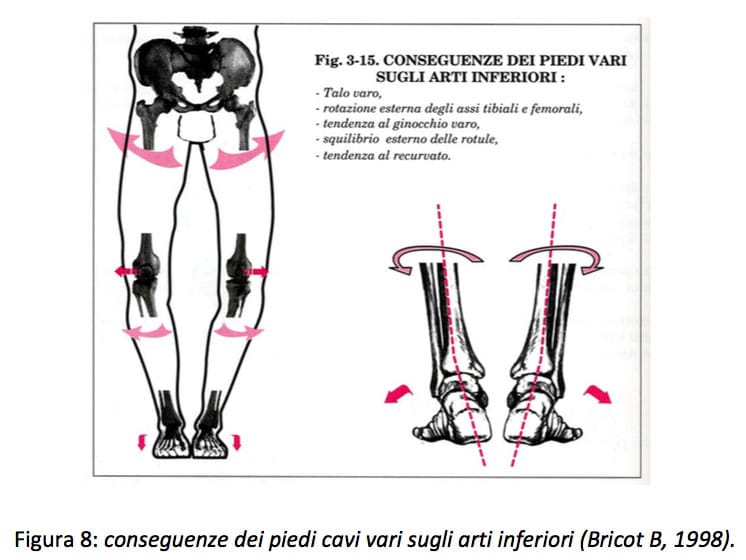
Piede piatto valgo:
fa parte dei piedi causativi e, a causa di una lassità legamentosa, sono caratterizzati da un cedimento dell’arco interno. Tale infossamento astragalo – calcaneare interno provoca una rotazione interna degli assi tibiali e femorali, disassamento interno rotuleo, valgismo di ginocchio, antiversione iliaca con aumento dell’angolo sacrale, iperlordosi con proiezione anteriore di L3 e addome prominente, ipercifosi dorsale e cervicale (Fig.9).
Piede piatto asimmetrico:
è un piede misto perché associato ad un versante causativo e, successivamente, ad uno adattivo a causa di uno squilibrio discendente. La situazione si presenta con un valgo asimmetrico del retro-piede che causa una rotazione asimmetrica degli assi tibiali e femorali. La coppia di forze testa-cotile non ha più la medesima direzione, né la stessa distribuzione delle pressioni a destra e a sinistra, il bacino ruota sul suo stesso asse e bascula. Il lato più basso e anteriore sarà il lato corrispondente al piede più valgo. La colonna vertebrale, a questo punto, come nel caso dei piedi cavi asimmetrici, tenderà a modificarsi in due modi: armonioso, con attitudine scoliotica o disarmonico, caratterizzato da blocchi vertebrali a vari livelli.
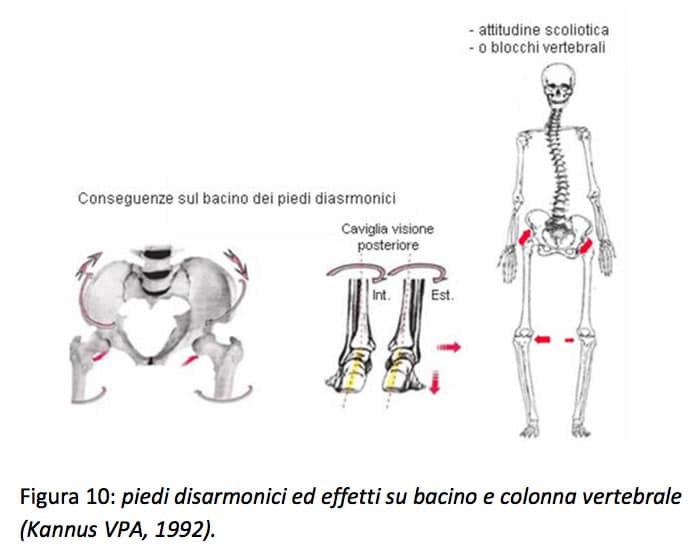
Piedi disarmonici:
Si definiscono “disarmonici” due retro-piedi con caratteristiche opposte, ossia un valgo da un lato e un varo dall’altro (Fig.10). Questo tipo di piede è uno dei casi più frequenti poiché esprime la modalità con cui si adattano i piedi normali, a doppia componente, lievemente valghi o vari compensando un problema discendente e acquisendo così un carattere adattivo. Sono considerati adattivi puri quando sono il riflesso dell’adattamento di un piede normale, oppure adattivi misti quando rappresentano l’adattamento degli altri tre tipi di piede. L’appoggio unipodalico mette in evidenza le disarmonie dette poiché un piede si manterrà in equilibrio con appoggio varizzante e l’altro con appoggio valgizzante.
Piede a doppia componente:
Questa tipologia di piede è visibile solamente durante una visita dinamica, tramite analisi del cammino, e non nella posizione ortostatica poiché il cambio precoce di appoggio da retropiede in varo ad avampiede il valgo, senza passare per un rotolamento e svolgimento del mesopiede o istmo, avviene nella dinamica temporale dell’appoggio al suolo. Perciò, un piede a doppia componente è un piede che presenta componenti sia “varizzanti” sia “valgizzanti”.
Tutto ciò determina una proiezione anteriore del centro di massa che porta a delle sollecitazioni muscolari anomale a livello lombare con contrazione costante dei paravertebrali, che si trovano a combattere con tale proiezione anteriore. Ciò porta tensioni e dolori alla colonna vertebrale a diverse altezze, a livello dei trocanteri, ai polpacci, alle piante dei piedi. Avere un piede a doppia componente comporta il dorso piatto ed il piano scapolare anteriore.
Per scaricare la tesi in versione integrale Clicca qui
Redazione SPRINTIT
La redazione di SPRINTIT è composta da :
- Ing. Diego Scattolin: esperto di strumentazioni per la misurazione della postura e pedane stabilometriche
- Matteo Crisci: esperto di web-marketing e strategie digitali
- Marta Foscheri: content writer
- Dott. Massimo Rossato: medico chirurgo specializzato in anestesia e rianimazione
- Dott.ssa Lina Azzini: medico chirurgo odontoiatra specializzata in chirurgia maxillo facciale
Gli articoli e i post del blog vengono decisi e redatti da tutta la redazione, vengono revisionati sia nella forma che nel contenuto, per essere il più fedeli possibile alla scienza medica moderna e approvata.